Loading...
Searching...
No Matches
Homotopy Class Referenceabstract
Abstract base for the predictor-corrector path-tracker hierarchy. More...
#include <SLP-defs.hpp>
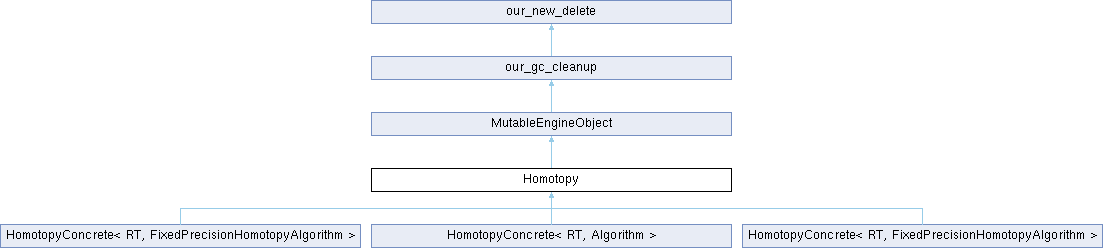
Inheritance diagram for Homotopy:
Public Member Functions | |
| virtual | ~Homotopy () |
| virtual bool | track (const MutableMatrix *inputs, MutableMatrix *outputs, MutableMatrix *output_extras, gmp_RR init_dt, gmp_RR min_dt, gmp_RR epsilon, int max_corr_steps, gmp_RR infinity_threshold, bool checkPrecision)=0 |
| virtual void | text_out (buffer &o) const =0 |
| Public Member Functions inherited from MutableEngineObject | |
| MutableEngineObject () | |
| virtual | ~MutableEngineObject () |
| unsigned int | hash () const |
| Public Member Functions inherited from our_gc_cleanup | |
| our_gc_cleanup () | |
| virtual | ~our_gc_cleanup () |
Additional Inherited Members | |
| Static Public Member Functions inherited from our_new_delete | |
| static void * | operator new (size_t size) |
| static void * | operator new[] (size_t size) |
| static void | operator delete (void *obj) |
| static void | operator delete[] (void *obj) |
| static void * | operator new (size_t size, void *existing_memory) |
| static void * | operator new[] (size_t size, void *existing_memory) |
| static void | operator delete (void *obj, void *existing_memory) |
| static void | operator delete[] (void *obj, void *existing_memory) |
Detailed Description
Abstract base for the predictor-corrector path-tracker hierarchy.
- Note
- AI-generated documentation. Verify against the source before relying on it.
The single virtual entry point track() walks columns of inputs (each carrying an initial solution plus the start value of the continuation parameter t in its last coordinate) toward target values, writing the result into outputs and per-path status into output_extras. Implementation lives in HomotopyConcrete<RT, Algorithm> with Algorithm chosen by the HomotopyAlgorithm<RT> traits class above.
Definition at line 360 of file SLP-defs.hpp.
The documentation for this class was generated from the following file:
- Macaulay2/e/SLP-defs.hpp